
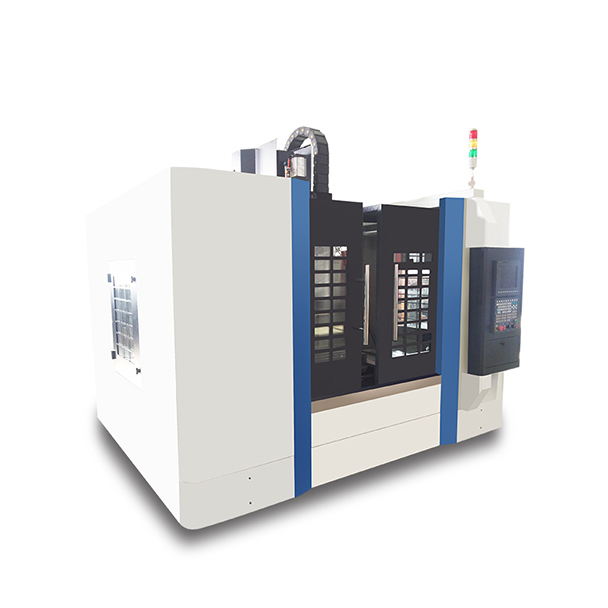


vmc1060 कारखाना धातु 3 अक्ष ऊर्ध्वाधर सीएनसी मिलिंग मशीन केंद्र
फ़ायदा
1. वैकल्पिक सीएनसी टर्नटेबल चार-अक्ष और पांच-अक्ष समन्वय लिंकेज प्रसंस्करण बना सकता है।
2. आंतरिक सफाई सुनिश्चित करने के लिए बिस्तर संरचना के साथ वैकल्पिक स्वचालित चिप हटाने वाला उपकरण;वैकल्पिक धुरी तेल ठंडा, आदि।
3. सामग्री में अवशिष्ट तनाव को खत्म करने के लिए कास्टिंग दो उम्र बढ़ने के उपचार से गुजरती है।
4. एक्स, वाई, जेड-दिशा गाइड ताइवान के हेवी-ड्यूटी रैखिक बॉल गाइड चुन सकते हैं, जिनमें तेज गति, उच्च कठोरता आदि की विशेषताएं हैं।

विनिर्देश
| वस्तु | वीएमसी1060 | ||||
| वर्कटेबल का आकार (लंबाई × चौड़ाई) मिमी | 1300×600 | ||||
| टी स्लॉट (मिमी) | 5-18×100 | ||||
| वर्कटेबल (केजी) पर अधिकतम लोडिंग वजन | 650 | ||||
| एक्स-एक्सिस यात्रा (मिमी) | 1000 | ||||
| वाई-अक्ष यात्रा (मिमी) | 600 | ||||
| जेड-एक्सिस यात्रा (मिमी) | 600 | ||||
| स्पिंडल नाक और टेबल (मिमी) के बीच की दूरी | 100-700 | ||||
| धुरी केंद्र और स्तंभ (मिमी) के बीच की दूरी | 667 | ||||
| स्पिंडल टेपर | बीटी40/50 | ||||
| मैक्स।धुरी गति (आरपीएम) | 8000/10000/12000 | ||||
| स्पिंडल मोटर पावर (किलोवाट) | 11/15 | ||||
| तेजी से खिला गति: एक्स, वाई, जेड अक्ष (एम / मिनट) | 16/16/16 (24/24//24 लाइनर गाइडवे) | ||||
| तेजी से काटने की गति (एम / मिनट) | 10 | ||||
| स्थितीय सटीकता (मिमी) | ±0.005 | ||||
| स्थितिगत सटीकता दोहराएं (मिमी) | ±0.003 | ||||
| ऑटो उपकरण परिवर्तक प्रकार | 16 टूल्स हेड टाइप टूल चेंजर (वैकल्पिक 24 आर्म टाइप ऑटो टूल चेंजर) | ||||
| मैक्स।उपकरण की लंबाई (मिमी) | 300 | ||||
| मैक्स।उपकरण व्यास | 80 (आसन्न उपकरण) / φ150 (आसन्न उपकरण नहीं) | ||||
| अधिकतम उपकरण वजन (केजी) | 8 | ||||
| टूल चेंजिंग टाइम (टूल-टू-टूल) सेकंड | 7 | ||||
| वायु दाब (एमपीए) | 0.6 | ||||
| मशीन वजन (केजी) | 7500 | ||||
| कुल मिलाकर आकार (मिमी) | 3340*2800*2700 | ||||
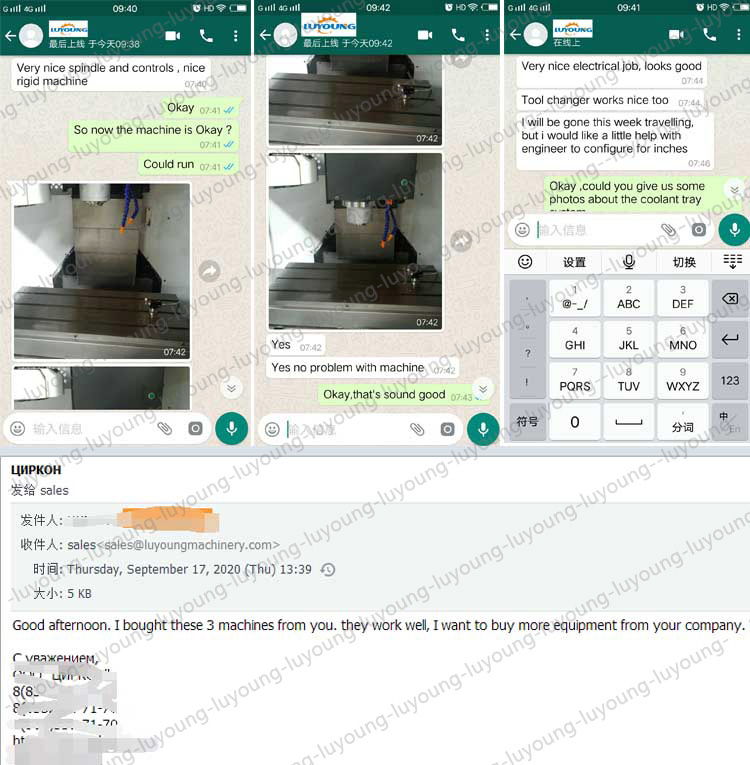
हमारा चयन क्यों
हमें ग्राहकों से बहुत अच्छी प्रतिक्रिया मिलती है, उदाहरण के लिए:
बहुत अच्छा धुरी और नियंत्रण, अच्छी कठोर मशीन।बहुत अच्छा बिजली का काम, अच्छा लग रहा है।
टूल चेंजर भी अच्छा काम करता है।
मैंने आपसे 3 मशीनें खरीदीं।वे अच्छा काम करते हैं, मैं आपकी कंपनी से और उपकरण खरीदना चाहता हूं।
मशीन परीक्षण
1. रैखिक गति स्थिति निर्धारण सटीकता का पता नो-लोड स्थितियों के तहत किया जाना चाहिए, और लेजर माप प्रबल होगा।
2. रैखिक गति की दोहराव स्थिति सटीकता का पता लगाने, पता लगाने के लिए उपयोग किया जाने वाला उपकरण वही है जो स्थिति सटीकता का पता लगाने के लिए उपयोग किया जाता है।
3. रैखिक गति की उत्पत्ति की वापसी सटीकता का पता लगाना।
4. रेखीय गति की रिवर्स एरर डिटेक्शन को कई बार (आमतौर पर 7 बार) मध्य बिंदु और स्ट्रोक के दोनों सिरों के पास तीन स्थितियों में मापा जाता है, और प्रत्येक स्थिति के औसत मूल्य की गणना की जाती है, और प्राप्त औसत मूल्य का अधिकतम मूल्य है उलटा त्रुटि मान।






