

खराद की सीएनसी प्रणाली सीएनसी इकाई, स्टेपिंग सर्वो ड्राइव इकाई और मंदी स्टेपर मोटर से बना है।सीएनसी इकाई MGS--51 सिंगल-चिप माइक्रो कंप्यूटर को अपनाती है।सीएनसी इकाई का नियंत्रण कार्यक्रम विभिन्न कार्यों को साकार करने का मूल है।विशिष्ट प्रसंस्करण लंबाई, चलती दिशा और फ़ीड गति निर्धारित की जाती है।सेंट्रल प्रोसेसिंग यूनिट के समर्थन से, इनपुट प्रोसेसिंग प्रोग्राम डेटा के अनुसार, कंट्रोल प्रोग्राम की गणना की जाती है और आवश्यक पल्स सिग्नल भेजने के लिए संसाधित किया जाता है, जिसे ड्राइवर द्वारा बढ़ाया जाता है और फिर संचालित किया जाता है।स्टेपर मोटर, मशीन टूल के स्वचालित नियंत्रण का एहसास करने के लिए यांत्रिक भार स्टेपर मोटर द्वारा संचालित होता है।
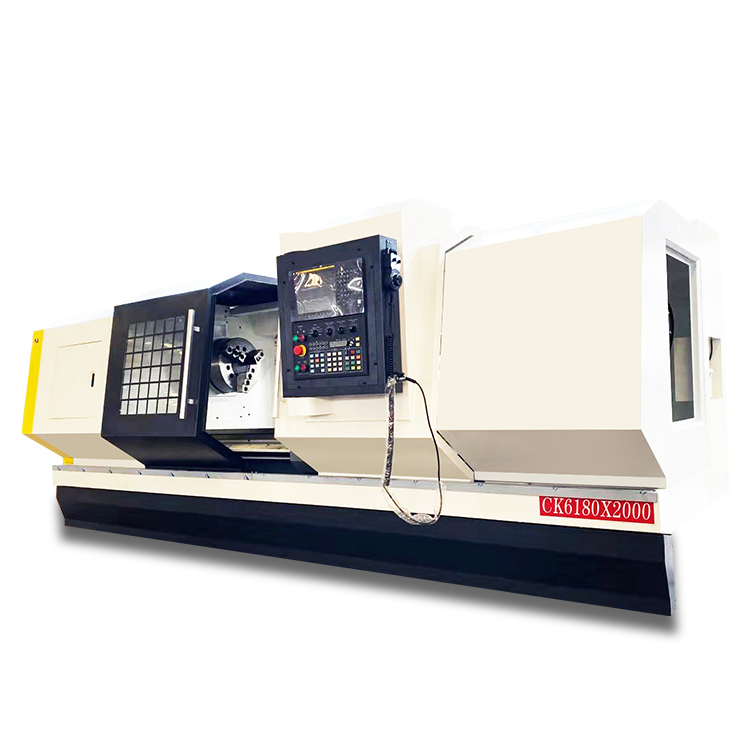
1. मशीनरी निर्माताओं की अनुकूलन आवश्यकताओं को पूरा करने के लिए ओपन एलसीडी इंटरफ़ेस योजना
2. उच्च परिभाषा एलसीडी डिस्प्ले, खराद प्रणाली में एक संवादी उपकरण अंशांकन कार्य होता है, और इंटरफ़ेस अधिक अनुकूल है
3. संकल्प को 7 अंकों, पूरी तरह से बंद-लूप नियंत्रण संरचना, उच्च नियंत्रण सटीकता पर सेट किया जा सकता है
4. रिच टूल मुआवजा फ़ंक्शन
5. यांत्रिक प्रतिक्रिया मुआवजा और पेंच पिच त्रुटि मुआवजा कार्यों के साथ
6. अद्वितीय कार्यक्रम हैंडव्हील परीक्षण समारोह, विरोधी टक्कर मशीन, सुरक्षित संचालन
7. प्रोग्राम सिमुलेशन, सिंगल सेक्शन, स्किप सेक्शन और प्रोग्राम रीस्टार्ट फ़ंक्शन के साथ, फ़ंक्शन अधिक शक्तिशाली है
8. खराद के मानक जी कोड, टी कोड और एस कोड प्रोग्रामिंग का समर्थन करने के अलावा, यह विभिन्न प्रकार के फिक्स्ड कटिंग साइकिल, कंपाउंड साइकिल और मैक्रो मैक्रो प्रोग्रामिंग भी प्रदान करता है।
9. प्रोग्राम स्टोरेज क्षमता 512 के बाइट्स है, और एनसी प्रोग्राम ग्रुप 1000 समूहों तक है
10. RS232C मानक इंटरफ़ेस प्रदान करें, जिसे प्रोग्राम ट्रांसमिशन को आसानी से महसूस करने के लिए एक व्यक्तिगत कंप्यूटर (पीसी) से जोड़ा जा सकता है
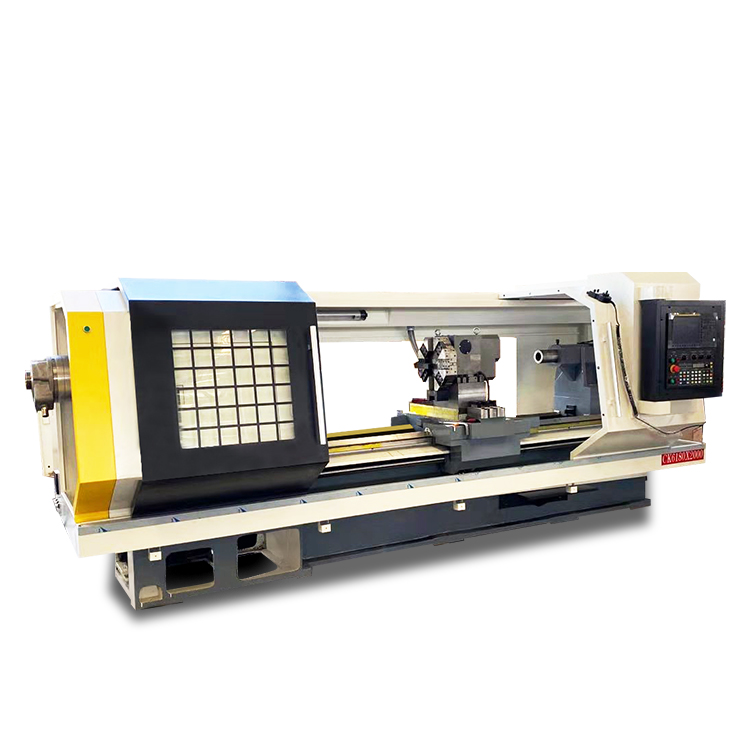
काम करने का सिद्धांत
मशीन टूल का न्यूमेरिकल कंट्रोल सिस्टम न्यूमेरिकल कंट्रोल यूनिट, स्टेपर ड्राइव यूनिट और डेसेलेरेशन स्टेपर मोटर से बना होता है।संख्यात्मक नियंत्रण इकाई MGS--51 सिंगल-चिप माइक्रो कंप्यूटर को अपनाती है।संख्यात्मक नियंत्रण इकाई का नियंत्रण कार्यक्रम विभिन्न कार्यों को साकार करने का मूल है।भागों प्रसंस्करण कार्यक्रम में, विशिष्ट प्रसंस्करण लंबाई, चलती दिशा और फ़ीड गति को देखते हुए, नियंत्रण कार्यक्रम, केंद्रीय प्रसंस्करण इकाई के समर्थन से, इनपुट प्रोसेसिंग प्रोग्राम डेटा के अनुसार, गणना और प्रसंस्करण के माध्यम से, आवश्यक पल्स भेजता है संकेत, और चालक की शक्ति प्रवर्धन के बाद, स्टेपर मोटर संचालित होती है, और मशीन उपकरण के स्वचालित नियंत्रण का एहसास करने के लिए यांत्रिक भार को स्टेपर मोटर द्वारा खींचा जाता है।जब मशीनिंग थ्रेड्स, स्पिंडल पल्स जनरेटर को कंप्यूटर पर स्पिंडल कोणीय विस्थापन परिवर्तन सिग्नल संचारित करने के लिए कॉन्फ़िगर किया जाना चाहिए।कंप्यूटर सेट थ्रेड पिच के अनुसार इंटरपोलेशन करता है और विभिन्न थ्रेड्स को प्रोसेस करने के लिए टूल होल्डर को नियंत्रित करता है।मशीनिंग को स्वचालित करने के लिए उपयोगकर्ता की जरूरतों के अनुसार सिस्टम एसटीएम सिग्नल भेज या प्राप्त कर सकता है।
एहतियात
पावर-ऑन डिबगिंग
वायरिंग आरेख के अनुसार बिजली की आपूर्ति और मोटर प्लग डालें, पावर एम्पलीफायर स्विच को बंद स्थिति में रखें, और सिस्टम पावर स्विच चालू करें।बिजली चालू होने के बाद, संख्यात्मक नियंत्रण इकाई को सामान्य रूप से काम करना चाहिए।इस समय, अक्षीय प्रवाह प्रशंसक के संचालन की जाँच की जानी चाहिए, और पंखे के बंद होने पर काम करने की सख्त मनाही है।पावर एम्पलीफायर स्विच को चालू स्थिति में रखें।मैन्युअल रूप से जांचें कि क्या ड्राइव ठीक से काम कर रहा है।प्रोग्राम इनपुट चरणों के अनुसार, पार्ट प्रोसेसिंग प्रोग्राम को इनपुट करने का प्रयास करें, प्रत्येक फ़ंक्शन की जांच करें, और फिर इसे सामान्य होने के बाद ही ऑनलाइन डिबग किया जा सकता है।उपयोग में सावधानियां यदि यह पाया जाता है कि डिबगिंग के दौरान मोटर की रोटेशन दिशा निर्धारित दिशा के विपरीत है, तो दिशा स्विच के माध्यम से दिशा बदली जा सकती है।पावर डिवाइस के मापदंडों पर सिस्टम की उच्च आवश्यकताएं हैं, इसलिए इसे इच्छानुसार अन्य मॉडलों के साथ बदलने की अनुमति नहीं है।बिजली चालू होने पर चिप को सम्मिलित करना या बाहर निकालना सख्त मना है, या चिप को अपने हाथों से छूना।यदि रखरखाव के दौरान वेल्डिंग किया जाना चाहिए, तो सिस्टम के सभी बिजली स्रोतों को पहले काट दिया जाना चाहिए, और कंप्यूटर और बाहर से जुड़े सभी कनेक्टरों को अलग किया जाना चाहिए।इसके अलावा, यदि कंप्यूटर पर वेल्डिंग की जाती है, तो टांका लगाने वाले लोहे की अवशिष्ट गर्मी का उपयोग कंप्यूटर डिवाइस को नुकसान से बचाने के लिए किया जाना चाहिए।सिस्टम चालू होने के बाद, यदि यह लंबे समय तक नहीं चलता है, तो पावर एम्पलीफायर स्विच को लंबे समय तक एक चरण को लॉक करने से बचने के लिए बंद स्थिति में रखा जाना चाहिए, ताकि बिजली उपकरणों के नुकसान और बिजली के नुकसान को कम किया जा सके। .सिस्टम पावर कट जाने के बाद, इसे फिर से चालू करने से पहले इसे 30 सेकंड से अधिक समय तक प्रतीक्षा करनी चाहिए।इसे लगातार बिजली चालू और बंद करने की अनुमति नहीं है, अन्यथा कंप्यूटर की वर्तमान कार्यशील स्थिति असामान्य होगी, जो उपयोग को प्रभावित करेगी और घटकों को नुकसान पहुंचा सकती है।अपेक्षाकृत स्वच्छ वातावरण में सिस्टम का उपयोग करना सुनिश्चित करें।यदि साइट का वातावरण अपेक्षाकृत कठोर है (बहुत सारे लोहे का बुरादा और धूल), तो उपयोगकर्ता सिस्टम के एयर इनलेट और आउटलेट पर फिल्टर स्पंज जोड़ सकता है।बैकअप बैटरी न्यूमेरिकल कंट्रोल यूनिट बिजली बंद होने के बाद कंप्यूटर में पार्ट प्रोसेसिंग प्रोग्राम मेमोरी की रैम चिप को बिजली की आपूर्ति करने के लिए बैकअप बैटरी द्वारा संचालित होती है, ताकि उपयोगकर्ता के भागों के प्रसंस्करण कार्यक्रम को बचाया जा सके।पार्ट प्रोग्राम खोने से बचने के लिए बैटरी को चालू कंप्यूटर से बदलना चाहिए।बैटरी को बदलते समय, "+" और "-" की ध्रुवीयता पर ध्यान दें, और कनेक्शन को उल्टा न करें।प्लग इन करने के बाद, कंप्यूटर पर बैटरी सॉकेट के वोल्टेज को मापने के लिए उच्च आंतरिक प्रतिरोध वाले मल्टीमीटर का उपयोग करें।सामान्य वोल्टेज संदर्भ मूल्य: 4.5V ~ 4.8V।
| धातु बैंड काटने का कार्य मशीन | ||
| वस्तु | GT4240 रोटरी कोण बैंड काटने का कार्य मशीन | GT4240 रोटरी कोण (गैन्ट्री) बैंड काटने का कार्य मशीन |
| अधिकतम काटने का आकार (मिमी) | 0°400, 45° 310, 60° 210 | |
| ब्लेड आकार (मिमी) देखा | 1960X34X1.1 | 5160X34X1.1 |
| देखा ब्लेड गति (एम / मिनट) | 27X45X69 | |
| देखा पहिया व्यास (मिमी) | 520 | |
| फ़ीड की गति | स्टेपलेस | |
| मुख्य मोटर शक्ति (किलोवाट) | 4 किलोवाट | |
| हाइड्रोलिक पंप मोटर पावर (किलोवाट) | 0.75 किलोवाट | |
| पानी पंप मोटर (किलोवाट) | 0.04 किलोवाट | 0.09 किलोवाट |
| वर्किंग क्लैम्पिंग | हाइड्रोलिक क्लैंपिंग | |
| चलाने का तरीका | कीड़ा और गियर | |
| कुल मिलाकर आयाम (मिमी) | 2300X1400X1800 | 2300X1400X1800 |
| वजन (किग्रा) | 1100KG | 1300KG |
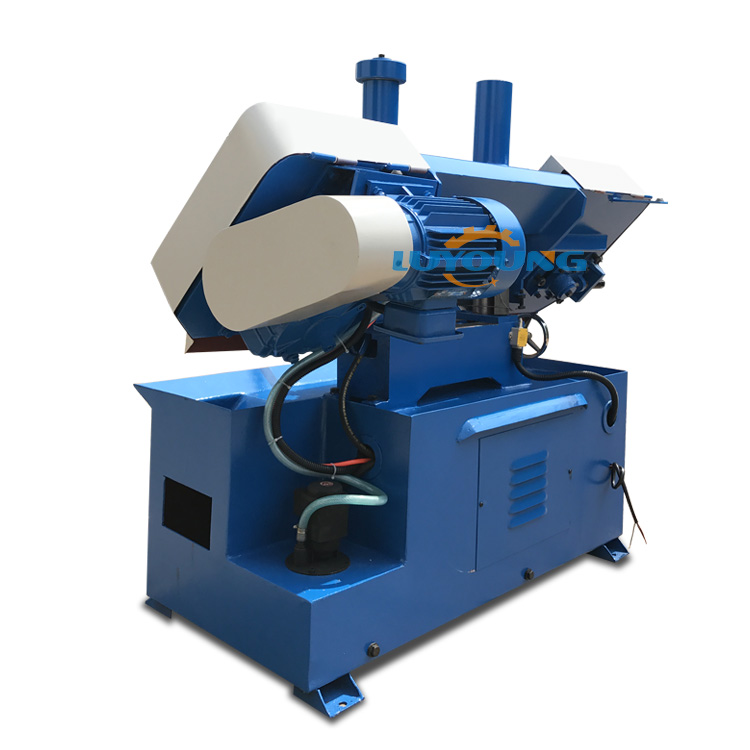
रिंग आरा बैंड दो आरा पहियों पर तनावग्रस्त होता है, और आरा पहिया काटने के लिए आरा बैंड को चलाता है।बैंड काटने की मशीन के दो मुख्य प्रकार हैं: लंबवत और क्षैतिज।वर्टिकल बैंड आरा मशीन का आरा फ्रेम लंबवत रूप से सेट किया गया है, और शीट के वक्र समोच्च और गठित भाग को काटने के लिए काटने के दौरान काम का टुकड़ा चलता है।फाइलिंग या सैंडिंग के लिए आरा बैंड को फाइल चेन या सैंडिंग बेल्ट से भी बदला जा सकता है।क्षैतिज बैंड आरा मशीन का आरा फ्रेम क्षैतिज या तिरछे व्यवस्थित होता है, और ऊर्ध्वाधर दिशा या एक बिंदु के चारों ओर झूलने की दिशा में फ़ीड करता है।आरी के दांतों को वर्कपीस के लंबवत रखने के लिए आरी बैंड को आमतौर पर 40 डिग्री घुमाया जाता है।क्षैतिज प्रकार को कैंची प्रकार, डबल कॉलम, सिंगल कॉलम टाइप बैंड आरा में विभाजित किया गया है;उपयोग के अनुसार, इसे मैनुअल प्रकार (किफायती मैनुअल फीडिंग और सामग्री की मैन्युअल कटिंग) और स्वचालित प्रकार में विभाजित किया गया है;नियंत्रक का उपयोग कर स्वचालन कार्यक्रम के अनुसार, इसे मैनुअल प्रकार (अर्ध-स्वचालित मैनुअल फीडिंग) स्वचालित प्रकार (स्वचालित खिला और स्वचालित काटने) में विभाजित किया जा सकता है;काटने के कोण की आवश्यकताओं के अनुसार, इसे कोण काटने की मशीन (90 डिग्री और 45 डिग्री के काटने के कोण को देखा जा सकता है) में बिना कोण के, यानी 90 डिग्री ऊर्ध्वाधर काटने में विभाजित किया गया है।
डबल कॉलम क्षैतिज धातु बैंड काटने का कार्य मशीन श्रृंखला बैंड काटने का कार्य मशीन की विशेषताएं:
डबल कॉलम संरचना, लंबवत उठाने, उच्च स्थिरता
काटने की गति का हाइड्रोलिक नियंत्रण, स्टीप्लेस गति विनियमन
वर्क पीस क्लैंपिंग हाइड्रोलिक क्लैम्पिंग, संचालित करने में आसान
अनुकूलित तीन-तरफा हाइड्रोलिक कसने वाला उपकरण
उत्पाद में कॉम्पैक्ट संरचना, स्थिर प्रदर्शन, सरल संचालन, उच्च उत्पादन क्षमता, मजबूत सुरक्षा आदि की विशेषताएं हैं।
देखा ब्लेड ब्रेक इंडक्शन, स्वचालित आपातकालीन शटडाउन
पोस्ट करने का समय: अगस्त-10-2022